Phân tích các giải pháp điều khiển hành trình tàu thủy dựa trên giải thuật tối ưu nâng cao
Bài báo phân tích các nghiên cứu gần đây về điều khiển tối ưu định tuyến tàu thủy, trong đó các phương pháp điều khiển hiện đại được đề cập với các phương pháp điều khiển mờ, nơron, nơron-mờ và nơron-mờ thích nghi.
|
ThS. Lê Vinh Phan TS. Đặng Xuân Kiên PGS. TS. Trần Cảnh Vinh Trường Ðại học Giao thông vận tải TP. Hồ Chí Minh Người phản biện: TS. Võ Công Phương |
TÓM TẮT: Bài báo phân tích các nghiên cứu gần đây về điều khiển tối ưu định tuyến tàu thủy, trong đó các phương pháp điều khiển hiện đại được đề cập với các phương pháp điều khiển mờ, nơron, nơron-mờ và nơron-mờ thích nghi. Dựa trên phân tích và mô phỏng kiểm chứng cho thấy việc áp dụng các giải thuật điều khiển tối ưu mở rộng bằng thuật toán di truyền (GA), tối ưu đàn kiến (ACO) hay tối ưu hóa bầy đàn (PSO) khi có các yếu tố tác động vào quá trình điều khiển tàu là hướng nghiên cứu đầy triển vọng.
TỪ KHÓA: Kỹ thuật điều khiển hiện đại, điều khiển định tuyến hành trình, nơron-mờ.
Abstract: In this paper, we present an analysis of the recently papers on the field of the ship routing advanced control based on the advanced optimal algorithms, which are concerned with the control methods of fuzzy, neural, fuzzy - neural and adaptive fuzzy - neural. Using the anylysis and simulation, we showed the prospect in motivation research which is applying of extend optimal ship controls by Genetic Algorithm (GA), Ant Colony Optimization (ACO) or Particle Swarm Optimization (PSO) under the effect of the disturbance.
Keywords: Advanced control, ship routing control, fuzzy-neural.
1. ĐẶT VẤN ĐỀ
Mô hình toán học của tàu trong không gian được xây dựng với hệ trục 6 bậc tự do [1], mô phỏng chuyển động của tàu trên Matlab. Trên cơ sở đó, mô hình toán học của tàu được phân tích và đánh giá dưới tác động của các ngoại lực tác động lên tàu thân tàu và bánh lái [2], xét cả các yếu tố phi tuyến ảnh hưởng đến tàu, những yếu tố phi tuyến này thường được đơn giản hóa trong quá trình thiết kế để mô hình trở nên đơn giản.
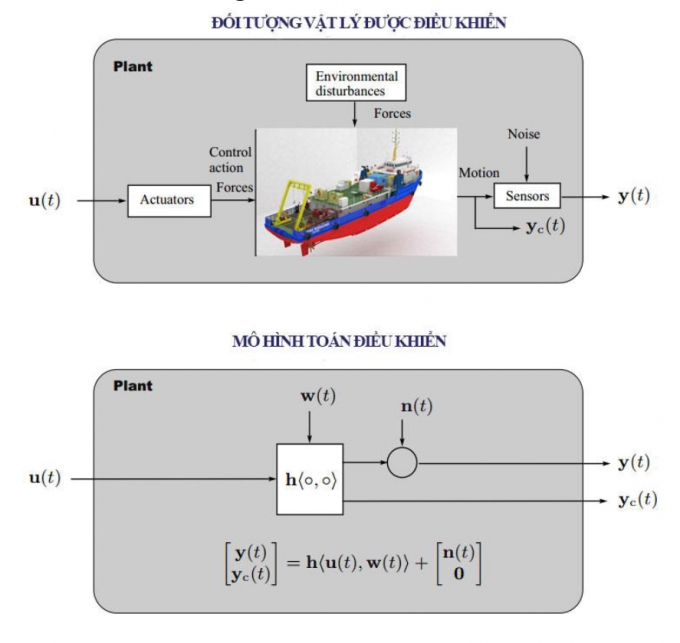 |
| Hình 1.1: Mô hình toán của hệ thống điều khiển tàu thủy |
Trong đó:
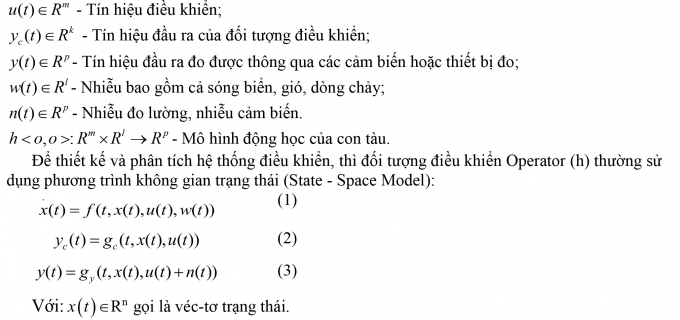 |
2. PHÂN TÍCH CÁC HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG TÀU BIỂN HIỆN ĐẠI
Để mô tả chính xác hơn hoạt động của tàu nhằm cung cấp cho bộ điều khiển đối tượng để huấn luyện cũng như thử nghiệm các phương pháp điều khiển mới thì mô hình toán học của tàu MMG [3] được phân tích cụ thể hơn bằng cách xác định các thành phần tác động riêng lên tàu như: Bánh lái, thiết bị đẩy và các lực thủy động lực học ảnh hưởng đến hướng đi của tàu. Gần đây, một số nghiên cứu đã áp dụng lí thuyết điều khiển hiện đại vào lĩnh vực điều khiển các phương tiện dưới nước, trong đó [4] và [5] đã sử dụng bộ nhận dạng mờ và Neural online để ước lượng thời gian trễ điều khiển, từ đó nâng cao chất lượng của hệ thống lái, kết hợp với bộ điều khiển bền vững được tổng hợp bằng phương pháp Mc Farlan-Glover cho thấy hệ thống có khả năng giữ ổn định với đối tượng nằm trong giới hạn của sự không chắc chắn chưa xác định.
Phương pháp phản hồi trực tiếp đã được áp dụng cho mô hình toán học của tàu sử dụng công thức Nomoto [6] bậc 1 và bậc 2, phương pháp này đáp ứng khá tốt tín hiệu ngõ ra. Ứng dụng bộ điều khiển ANFIS để điều khiển đối tượng, xây dựng phương pháp và huấn luyện bộ điều khiển để đáp ứng tốt ngõ ra theo các giá trị của ngõ vào yêu cầu, kết quả đáp ứng tương đối tốt. Bằng việc sử dụng công thức Nomoto bậc 2, kết hợp với phương pháp điều khiển DSC [6] đã phần nào mô phỏng được hoạt động của tàu với các tham số lựa chọn từ thực nghiệm. Bộ điều khiển hồi tiếp ngõ ra Neural mờ thích nghi trực tiếp được sử dụng để điều khiển trong phương tiện quân sự [7] có kết hợp với yếu tố thay đổi độ sâu của mực nước biển và vận tốc của dòng nước chảy ảnh hưởng đến mô hình cũng phần nào thấy được khả năng đáp ứng tốt và tính ổn định của phương pháp điều khiển nơron-mờ.
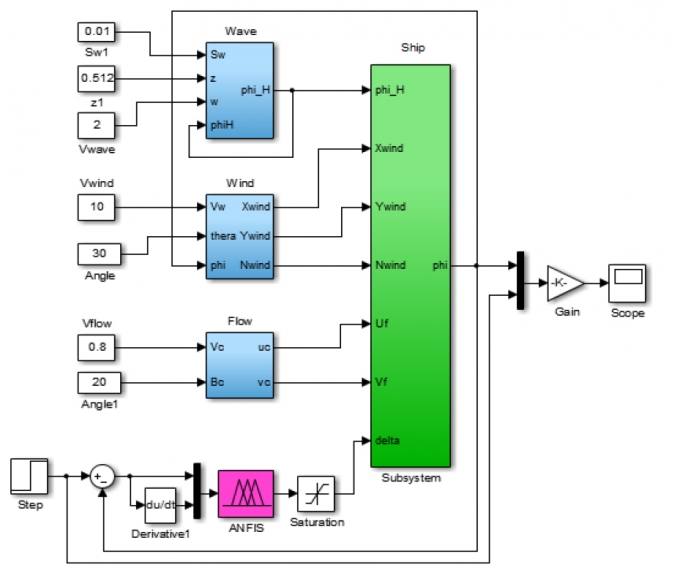 |
| Hình 2.1: Mô hình mô phỏng hệ thống điều khiển tàu thủy sử dụng nơron-mờ [6] |
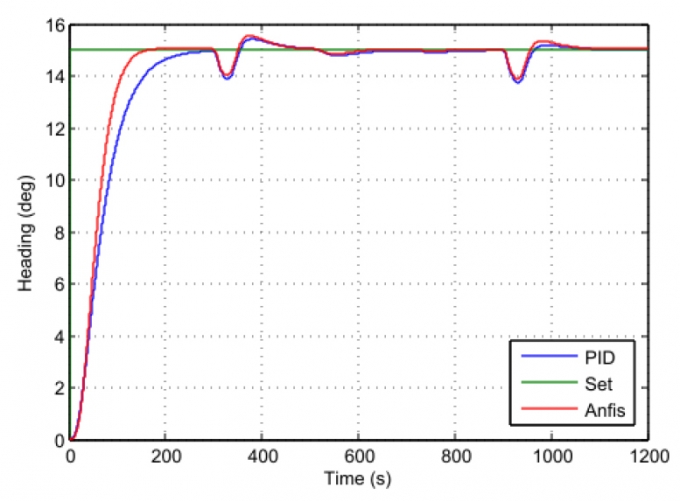 |
| Hình 2.2: Hướng đi của tàu khi đầy tải, biển động nhẹ |
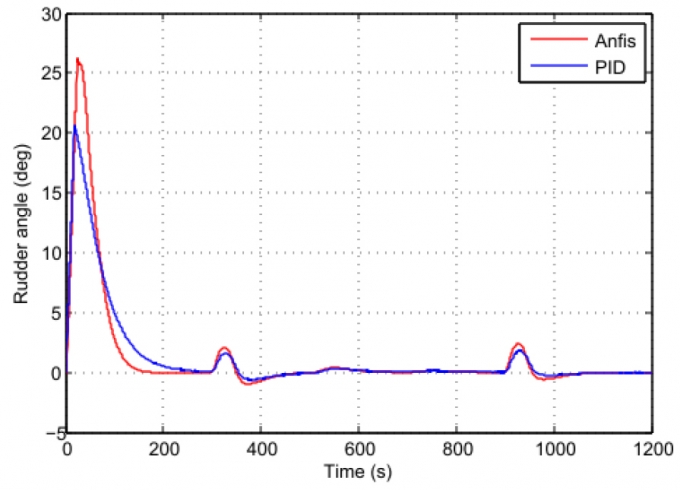 |
| Hình 2.3: Góc bẻ lái của tàu khi không tải, biển động nhẹ |
Nhận xét: Kết quả mô phỏng trên Matlab thể hiện trên Hình 2.2 và Hình 2.3 cho thấy, phương pháp điều khiển nơron-mờ (ANFIS) cho đáp ứng tốt hơn phương pháp kinh điển (PID), nhưng khi điều khiển tàu tự động truy theo một hành trình được định tuyến trước thì phương pháp này chưa được đề cập. Khi biển có gió mạnh hoặc sóng lớn hệ thống dễ bị mất kiểm soát cũng là một nhược điểm của ANFIS.
3. PHÂN TÍCH CÁC HỆ THỐNG ĐIỀU KHIỂN TÀU THỦY TỐI ƯU ĐỊNH TUYẾN KHI XEM XÉT TỚI ẢNH HƯỞNG CỦA MÔI TRƯỜNG
Ở đây chúng ta đề cập đến hai vấn đề: Điều khiển tối ưu định tuyến và ảnh hưởng của nhiễu môi trường, tuy nhiên đa phần các tác giả chỉ xem xét một trong hai yếu tố kể trên khi thiết kế hệ thống điều khiển tự động tàu thủy.
Phương pháp điều khiển mờ thích nghi hệ thống lái tự động tàu thủy khi xét hệ thống lái tàu là phi tuyến và không xác định đã được đề cập trong [5-6], trong đó thuật toán mờ Takagi-Sugeno được áp dụng dưới mô hình điều khiển thích nghi. Cũng bằng phương pháp mờ thích nghi, các tác giả trong [8] giải quyết bài toán điều khiển lái tự động tàu thủy bám theo hành trình xác định trước nhưng chưa xem xét yếu tố tác động của môi trường.
Về điều khiển tối ưu, hệ thống lái tự động sử dụng mạng Neural với nhiều phương pháp huấn luyện mạng kết hợp thuật toán dự đoán ảnh hưởng của tác động ngoại vi lên bánh lái có tính chất thích nghi [9] cho thấy đáp ứng khá tốt nhưng không thấy đề cập đến vấn đề tối ưu, trong khi đó thuật toán tối ưu di truyền sử dụng để tối ưu bộ điều khiển mạng Neural nhân tạo đã được xem xét trong [10] cho thấy ưu điểm nổi bật của phương pháp này. Một số hệ thống điều khiển tối ưu dựa trên phiếm hàm tuyến tính toàn phương (LQR) hoặc tối ưu bền vững [4-5] khi xem xét ảnh hưởng của các yếu tố không xác định tác động vào quá trình điều khiển hay điều khiển dựa trên nhận dạng [11] cho thấy sự đa dạng trong điều khiển tối ưu, nhưng thực sự chưa đề cập đến vấn đề định tuyến.
Nhận xét: Từ hai vấn đề nêu trên trong điều khiển tối ưu định tuyến cho thấy thời gian gần đây các phương pháp điều khiển hiện đại đã được ứng dụng rất nhiều trong thiết kế hệ thống lái tự động tàu thủy nhưng hầu hết các phương pháp trên đều chưa xem xét đến vấn đề định tuyến với những yếu tố tác động vào quá trình điều khiển bao gồm:
- Yếu tố không xác định trong tham số của đối tượng điều khiển (con tàu);
- Sai số cực đại, cực tiểu và tính chất bão hòa của bộ điều khiển khi điều khiển tàu theo tuyến hành trình;
- Nhiễu ngoại vi tác động vào làm mất hướng hoặc sai lệch góc bẻ lái;
- Tối ưu các tham số bộ điều khiển với các kỹ thuật mới (GA, ACO, PSO) với hàm mục tiêu xác định.
Việc kết hợp điều khiển tối ưu dựa trên các phương pháp hiện đại khi xem xét 4 yếu tố trên là bài toán rất khó đối với các nhà nghiên cứu.
4. KẾT LUẬN
Điều khiển tối ưu định tuyến tàu thủy là một hướng nghiên cứu mới nhiều tiềm năng. Trên phương diện lý thuyết, bằng các công cụ mô phỏng, áp dụng các giải thuật điều khiển tối ưu dựa trên thuật toán di truyền (GA), tối ưu đàn kiến (ACO) hay tối ưu hóa bầy đàn (PSO) khi có các yếu tố ảnh hưởng vào quá trình điều khiển tàu là một hướng nghiên cứu đầy triển vọng, có thể tạo ra những kết quả nghiên cứu hoàn toàn mới. Nghiên cứu lý thuyết bằng mô phỏng và kiểm nghiệm trên mô hình vật lý là quá trình tiếp theo giúp các nhà nghiên cứu tiếp tục tìm tòi và hướng tới ứng dụng các kết quả nghiên cứu của mình vào thực tế.
Tài liệu tham khảo
[1]. C.W. Mohd Noor, K.B. Samo, W.B. Wan Nik (01 January 2012), Ship manoeuvring assessment by using numerical simulation approach, Vol. 4.
[2]. Tristan P´erez and Mogens Blanke, Mathematical Ship Modeling for Control Applications, Technical University of Denmark, Building 326.
[3]. Yasuo Yoshimura (Graduate School of Fisheries Sciences, Hokkaido University, Japan) (August 2005), Mathematical Model for Manoeuvring Ship Motion (MMG Model), Workshop on Mathematical Models for Operations involving Ship-Ship Interaction, Tokyo.
[4]. Xuan-Kien Dang, Hoang-Dung Tran, Duc-Cuong Quach (Nov 2011), Robust Controller Design for Ship Autopilot with Unknown Time-delay, Viet Nam conference on Control and Automation.
[5]. Xuan-Kien Dang, Hoang-Dung Tran, Duc-Cuong Quach (Dec 2012), Ship Autopilot Design Based on Adaptive Smith Predictor Under the Effect of Uncertain Time-delay and Disturbances, Proc, The 6th Viet Nam conference on Mechantronics.
[6]. Nguyễn Thanh Quỳnh (2015), Điều khiển hệ thống lái tự động tàu thủy với thuật toán nơron-mờ sử dụng luật Takagi - Sugeno, Luận văn Thạc sỹ, Trường Đại học GTVT TP. Hồ Chí Minh.
[7]. Pham Van Phuc, Đang Xuan Kien, Truong Duy Trung (Nov 2013), Control system Design for Torpedo using a Direct Adaptive Fuzzy - Neural Output-feedback Controller, Viet Nam conference on Control and Automation.
[8]. K.J. Astrom and C.G. Kallstrom, Identification of Ship Dynamic. Automatica, Vol.12, pp.9-222, Pergamon Press, 1976, Printed in Great Britain.
[9]. Y.S. Yang and C.J. Zhou (December 2004), Adaptive Fuzzy Control of Ship Autopilots with Uncertain Nonlinear Systems, Proc. 2004 IEEE, Conference on Cybernetics and Intelligent Systems, Singapore, pp. 1323-1328.
[10]. J. Velagic, Z. Vukic and E. Omerdic (2002), Adaptive fuzzy ship autopilot for track-keeping, Control Engineering Practice, Vol 2, pp.433-443, Elselvier.
[11]. V. Nicolau, V. Palade, D. Aiordachioaie and C. Miholca (1989), Neural Network Prediction of the Roll Motion of a Ship for Intelligent Course Control, Lecture notes in control and information Science, Springer-Verlag, Berlin.
Tag:
Bình luận
Thông báo
Bạn đã gửi thành công.