Nghiên cứu chế tạo hệ thống tự động điều khiển nâng hạ các tấm là nhằm nâng cao tính năng của các máy rải thảm đường thế hệ cũ
Trên các máy rải thảm mặt đường thế hệ cũ, việc điều chỉnh độ dày lớp rải trong quá trình thi công phải thực hiện bằng tay.
|
ª ThS. Nguyễn Trọng Minh ª ThS. Đông Anh Nam Trường Cao đẳng Giao thông vận tải TW1 ª ThS. Lê Hoàng Long ª ThS. Lưu Tuấn Hải Trường Đại học Kinh doanh và Công nghệ Hà Nội Người phản biện: TS. Hoàng Thăng Bình TS. Khổng Vũ Quảng |
Tóm tắt: Trên các máy rải thảm mặt đường thế hệ cũ, việc điều chỉnh độ dày lớp rải trong quá trình thi công phải thực hiện bằng tay. Thao tác này vừa ảnh hưởng đến chất lượng bề mặt đường, vừa tốn nhân công cũng như ảnh hưởng tới sức khỏe của người vận hành. Nhóm nghiên cứu thuộc Đề tài “Nghiên cứu, thiết kế chế tạo hệ thống tự động điều chỉnh chiều dày lớp vật liệu rải cho máy rải SUMITOMO HA60W-3” đã chế tạo thành công hệ thống tự động nâng hạ các tấm là để tự động điều khiển chiều dày lớp thảm rải. Hệ thống được chế tạo với điều kiện công nghệ trong nước, lắp ráp dễ dàng, có thể sử dụng rộng rãi cho các loại máy rải thảm thế hệ cũ để nâng cao tính năng làm việc của máy.
Từ khóa: Máy rải thảm thế hệ cũ, hệ thống điều khiển tự động.
Abstract: On the older generation road surface pavement machine, pavement thickness adjustments were done by hand, which result in excessive use of manpower and danger toward construction workers. The research team "Study, construct automatic pavement material adjustment system for SUMITOMO HA60W-3 paver" has successfully created Automatic sheets lifting system. The system was constructed based on Vietnam technology, easy to build, maintain and compatible with older generation paver.
Keywords: Older generation paver, automatic control system.
1. Đặt vấn đề
Trong thi công mặt đường ô tô thường phải dùng máy rải thảm kết hợp với máy lu để rải và lu lèn lớp cấp phối, hoặc lớp bê tông asphalt. Chiều dày lớp thảm rải phụ thuộc rất nhiều yếu tố như loại vật liệu, cấp độ đường, quy trình thi công, độ dốc của đường, phụ thuộc độ siêu cao của đường, độ bằng phẳng của lớp nền đường… Vì vậy, trong quá trình vận hành phải thường xuyên điều chỉnh tấm là của máy để điều chỉnh chiều dày lớp vật liệu rải phù hợp, mặt đường sau khi rải phải bằng phẳng, có độ chặt đồng đều, đảm bảo đúng độ dốc, độ nghiêng của mặt đường.
Máy rải thảm đường HA60W-3 do hãng SUMITOMO (Nhật Bản) chế tạo là thiết bị chuyên dụng trong thi công mặt đường dùng bánh lốp và dẫn động 4WD. Được sản xuất từ những năm 80 của thế kỷ trước, trên máy chưa có các hệ thống tự động điều khiển sự làm việc của hệ nâng hạ tấm là [2]. Để vận hành máy cần ít nhất ba người: Lái máy chính và 2 thợ thường xuyên kiểm tra điều chỉnh bộ nâng hạ ở hai bên phía sau máy để điều chỉnh độ dày lớp rải theo mặt đường (Hình 1.1). Do việc điều khiển bằng tay, chất lượng bề mặt đường và chiều dày lớp rải phụ thuộc nhiều vào kinh nghiệm của người vận hành nên không đáp ứng được các yêu cầu chất lượng của mặt đường bộ, đặc biệt các mặt đường cao tốc. Ngoài ra, nhiệt độ của bê tông asphalt tại thời điểm rải xuống đường đạt tới 700C - 900C, các công nhân vận hành máy rải phải làm việc trong điều kiện chịu nhiệt độ cao và thường xuyên hít phải hơi nhựa nóng, ảnh hưởng xấu đến sức khỏe.
 |
| Hình 1.1: Bố trí 3 công nhân vận hành máy rải thảm HA60W-3 |
Những năm gần đây, trên các máy rải thế hệ mới được trang bị các hệ thống tự động kiểm tra và điều chỉnh chiều dày lớp rải đảm bảo các yêu cầu về độ phẳng bề mặt cũng như độ siêu cao và độ khum của mặt đường theo thiết kế. Các hệ thống điều khiển tự động này không những nâng cao chất lượng và hiệu quả làm việc của máy mà còn giảm nặng nhọc và độc hại cho thợ vận hành máy, giảm chi phí nhân công.
Để nâng cấp tính năng làm việc của các máy rải thảm thế hệ cũ, một số hãng chế tạo máy rải thảm đã cung cấp thiết bị lắp đặt bổ sung để nâng cấp hệ điều khiển tấm là cho các máy rải thảm thế hệ cũ, tuy nhiên giá thành của các bộ thiết bị này đắt [4].
Bài báo giới thiệu kết quả nghiên cứu thiết kế chế tạo hệ thống tự động điều chỉnh chiều dày lớp thảm rải trên mặt đường cho máy rải HA60W-3. Nội dung bài báo gồm 4 phần, sau phần giới thiệu chung, phần hai của bài báo trình bày các vấn đề liên quan đến sơ đồ dẫn động và phương án điều khiển trong dẫn động nâng hạ tấm là của máy rải thảm mặt đường HA60W-3. Phần ba giới thiệu các thiết kế cơ bản của hệ thống tự động điều khiển nâng hạ các tấm là của máy rải. Các đánh giá hiệu quả làm việc của hệ thống do nhóm nghiên cứu chế tạo được trình bày trong phần bốn của bài báo.
2. Dẫn động các tấm là của máy rải thảm đường
Các bộ phận trong hệ thống điều khiển chiều dày lớp thảm rải của máy (Hình 2.1) gồm có: Các thanh đòn 3, các xi-lanh thủy lực 1, 4 và giá treo (các điểm nối bản lề 5, 6, 7), mạch điện điều khiển các cụm rơ-le của van thủy lực điện từ, các công tắc điều khiển trên bảng điều khiển và hộp điều khiển ở vị trí thao tác phía sau máy, các tấm là phía trước và sau 8.
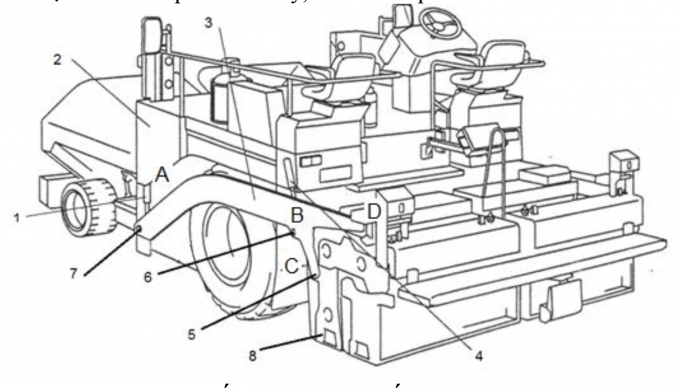 |
| Hình 2.1: Hệ thống giá treo các tấm là của máy rải thảm |
Hệ các thanh đòn 3 tạo thành giá treo các tấm là của máy. Hệ giá treo các tấm là bên trái và phải của máy làm việc độc lập tương đối với nhau. Giá treo được nối bản lề với thân máy rải ở hai điểm đầu cuối của các xi-lanh thủy lực A và B. Có hai xi-lanh A, 2 xi-lanh B tương ứng với các giá treo bên trái và bên phải của máy. Một đầu của xi-lanh thủy lực A được nối với giá treo và di chuyển trượt trên rãnh dẫn hướng theo phương thẳng đứng còn đầu nối của xi-lanh B với giá treo có thể lắc quanh khớp bản lề để tránh cưỡng bức khi chuyển vị của các tấm là. Các đầu còn lại của các xi-lanh A và B được nối khớp bản lề với thân máy. Cụm các tấm là được nối với giá treo ở các khớp xoay C và D. Tại điểm nối D, có bố trí cơ cấu chốt tỳ. Thông qua cơ cấu trục vít làm cho chốt tỳ tác dụng làm quay giá của các tấm là quanh chốt quay C, tạo góc nghiêng hướng dòng vật liệu được nạp vào tấm là.
Dầu có áp suất được cấp cho các xi-lanh thủy lực A và B từ các van phân phối. Chuyển dịch của con trượt của các van phân phối này được điều khiển bằng các van điện từ, cụm rơ-le điện và các công tắc điều khiển bố trí ở trên bảng điều khiển và trên các hộp điều khiển bên phải và bên trái (phía đuôi máy).
Hình 2.2 trình bày sơ đồ động học của hệ treo các tấm là của máy rải. Từ sơ đồ động cho thấy, trong quá trình máy rải chuyển động, nếu mặt đường không bằng phẳng, thân máy bị nâng lên hoặc hạ xuống (so với vị trí đặt ban đầu) thì các đầu trên của xi-lanh A và B (do gắn khớp bản lề với thân máy) cũng bị chuyển dịch theo. Muốn đảm bảo chiều dày lớp thảm rải không đổi cần phải điều khiển các pít-tông của xi-lanh A và B nâng lên hoặc hạ xuống với tỷ lệ tương ứng. Trong quá trình dịch chuyển này, pít-tông của xi-lanh A chuyển dịch theo phương thẳng đứng, còn xi-lanh B có chuyển động lắc để đảm bảo cho các tấm là trước và sau không bị cưỡng bức khi nâng, hạ.
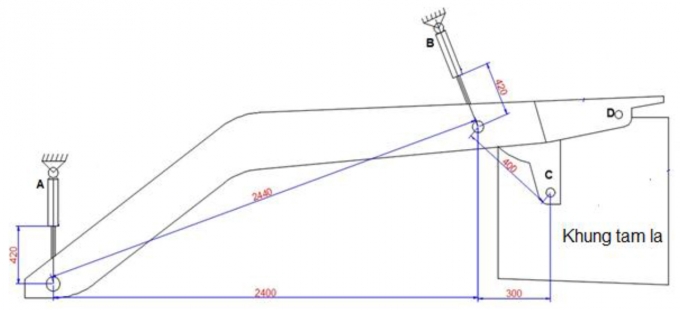 |
| Hình 2.2: Sơ đồ động của hệ giá treo các tấm là |
3. Thiết kế chế tạo hệ thống tự động điều khiển nâng hạ các tấm là của máy rải
Hình 3.1 trình bày sơ đồ khối nguyên lý của hệ thống điều khiển tự động. Một trong các thành phần quan trọng của hệ thống điều khiển tự động là các cảm biến.
 |
| Hình 3.1: Sơ đồ hệ thống điều khiển |
Để xây dựng hệ thống tự động điều khiển nâng hạ các tấm là phù hợp với chuyển vị của thân máy cần sử dụng các cảm biến đo chuyển vị thẳng đứng của thân máy so với nền đường trong quá trình rải thảm. Các tín hiệu về chuyển vị này sẽ là thông số điều khiển hành trình làm việc của các xi-lanh A và B (Hình 2.1, 2.2).
Qua các phân tích, nhóm đề tài đã chọn cảm biến đo khoảng cách kiểu siêu âm SRF-04 [3]. Nguyên lý hoạt động của cảm biến được trình bày trên Hình 3.2. Cảm biến gồm hai phần tử: Bộ phát sóng siêu âm và bộ thu sóng siêu âm. Bộ vi điều khiển gửi tín hiệu điều khiển tới đầu phát, khi đó đầu phát phát đi các chùm sóng với tần số f = 40 kHz. Trong quá trình lan truyền, sóng gặp vật cản và bị phản xạ trở lại. Đầu thu sẽ thu được phần sóng siêu âm bị phản xạ từ vật cản trả về.
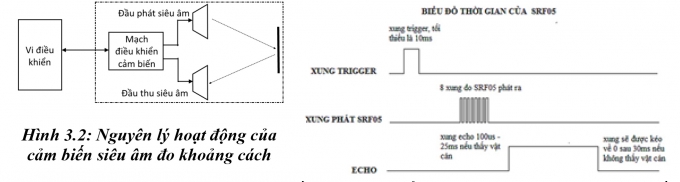 |
| Hình 3.2: Nguyên lý hoạt động của cảm biến siêu âm đo khoảng cách |
Đo khoảng thời gian T từ khi phát đến khi thu có thể xác định được khoảng cách S từ đầu phát đến vật cản theo công thức: S = (T x v)/2. Trong đó, v là vận tốc âm thanh (330 m/s). Để khắc phục các nhiễu do mấp mô ở mặt nền đường, đề tài chọn phương án sử dụng hai cảm biến siêu âm ghép nối theo sơ đồ logic AND. Khoảng cách giữa hai cảm biến này là 100mm đảm bảo cho các chùm sóng siêu âm thu phát của mỗi cảm biến không bị ảnh hưởng lẫn nhau.
Bộ điều khiển sử dụng chip ATMega 2560. Các Hình 3.3 và 3.4 trình bày thuật toán điều khiển và sơ đồ mạch kết nối các bộ cảm biến bên trái, bên phải với bộ vi xử lý. Tín hiệu ra được đưa đến các công tắc bố trí trên các hộp điều khiển bên phải và bên trái phía đuôi máy.
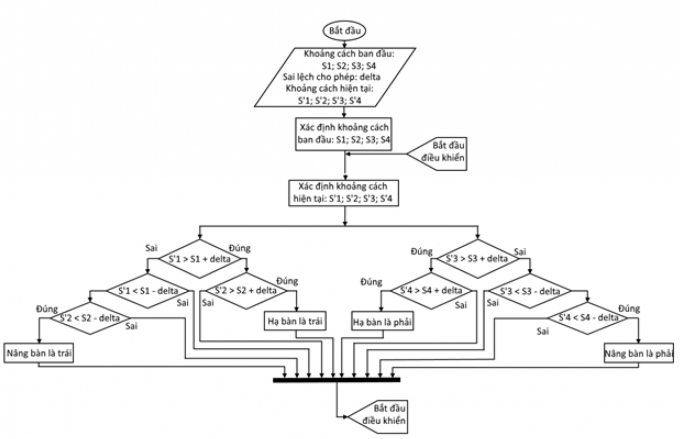 |
| Hình 3.3: Thuật toán điều khiển hệ thống tự động nâng hạ tấm là của máy rải thảm |
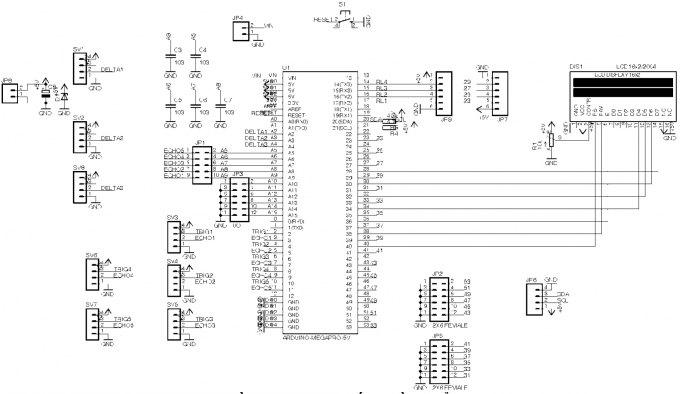 |
| Hình 3.4: Sơ đồ mạch của hệ thống điều khiển tự động |
4. Đánh giá tính năng làm việc của hệ thống
Hệ thống đã được chế tạo, lắp ghép lên máy và vận hành rải thảm đường [1]. Hệ thống đã được cấp giấy chứng nhận chất lượng kỹ thuật của Trung tâm Kiểm định và Kỹ thuật công nghiệp VRLAB30. Các kết quả khảo nghiệm cho thấy: Hệ thống có khả năng tự động điều chỉnh hành trình nâng hạ của xi-lanh A, B bên trái và phải độc lập và phù hợp với điều kiện mặt nền của đường thi công; có khả năng khắc phục các lồi lõm cục bộ của nền đường để tránh cho mặt thảm rải bị nhấp nhô gợn sóng, không phẳng. Đặc biệt, hệ thống tự động điều chỉnh này không làm thay đổi các mạch điện điều khiển và tính năng làm việc của các cụm chi tiết sẵn có của máy; không làm ảnh hưởng đến các thao tác điều khiển trên hộp điều khiển trong trường hợp người vận hành muốn điều khiển bằng tay các công tắc điều khiển nâng tấm là từ các hộp này; khả năng lắp ghép và hiệu chỉnh đơn giản, tiết kiệm thời gian và thuận tiện cho thao tác của người vận hành máy.
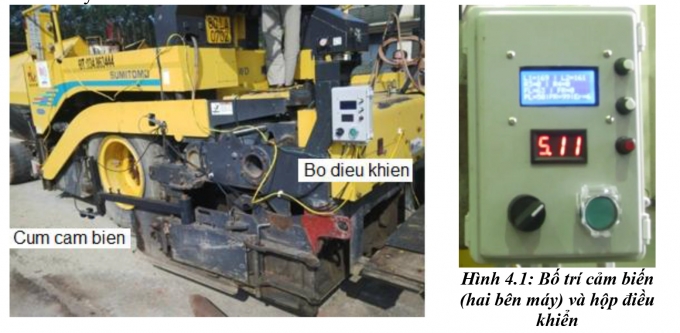 |
| Hình 4.1: Bố trí cảm biến (hai bên máy) và hộp điều khiểnhinh41 |
Hình 4.1 giới thiệu vị trí bố trí cảm biến và bộ điều khiển trên máy khi vận hành. Trên mặt hộp điều khiển có bố trí các nút để đặt và hiển thị các thông số làm việc của thiết bị cũng như công tắc chuyển chế độ điều khiển (tự động/bằng tay).
Hình 4.1 giới thiệu vị trí bố trí cảm biến và bộ điều khiển trên máy khi vận hành. Trên mặt hộp điều khiển có bố trí các nút để đặt và hiển thị các thông số làm việc của thiết bị cũng như công tắc chuyển chế độ điều khiển (tự động/bằng tay).
Hệ thống tự động điều chỉnh chiều dày lớp rải này hoàn toàn có thể sử dụng trên các loại máy rải thảm thế hệ cũ đang sử dụng trong nước, cho phép nâng cao tính năng và chất lượng mặt đường, giảm chi phí nhân công cũng như hạn chế ảnh hưởng độc hại của môi trường đến người vận hành máy.
Tài liệu tham khảo
[1]. Bộ GTVT (2015), Báo cáo tổng kết đề tài DT154046.
[2]. Sumitomo Construction Machinery Manufacturing Co.LTD, Operator’s Manual for HA60W-3.
[3]. Technical Documentation, SRF04 ultrasonic range sensor.
[4]. Leica Geosystems AG, Heerbrugg, Switzerland (2002), Machine Control for Road Pavers and Planers.
Tag:
Bình luận
Thông báo
Bạn đã gửi thành công.